溯源
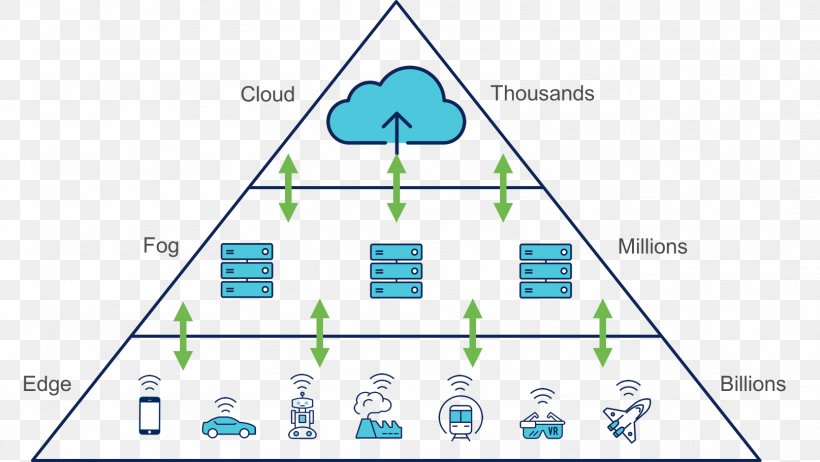
随着物联网(IoT)的周边设备——家庭、工厂、船舶、无人机、汽车等产生更多的数据,对网络和云资源提出更多要求,传统的服务器及云计算架构开始出现两个主要问题:
- 带宽是有限的,传输大量的数据很昂贵
- 请求/相应时间延迟会导致对时间敏感的操作的决策速度变慢,甚至出现更糟糕的情况(如自动驾驶)。
解决方案是将一些计算能力转移到系统的边缘,也就是靠近资产设备端,将智能和处理能力移向更靠近数据来源的地方。这样就出现了理解雾计算(Fog Computing)与边缘计算(Edge Computing)的概念。
概念
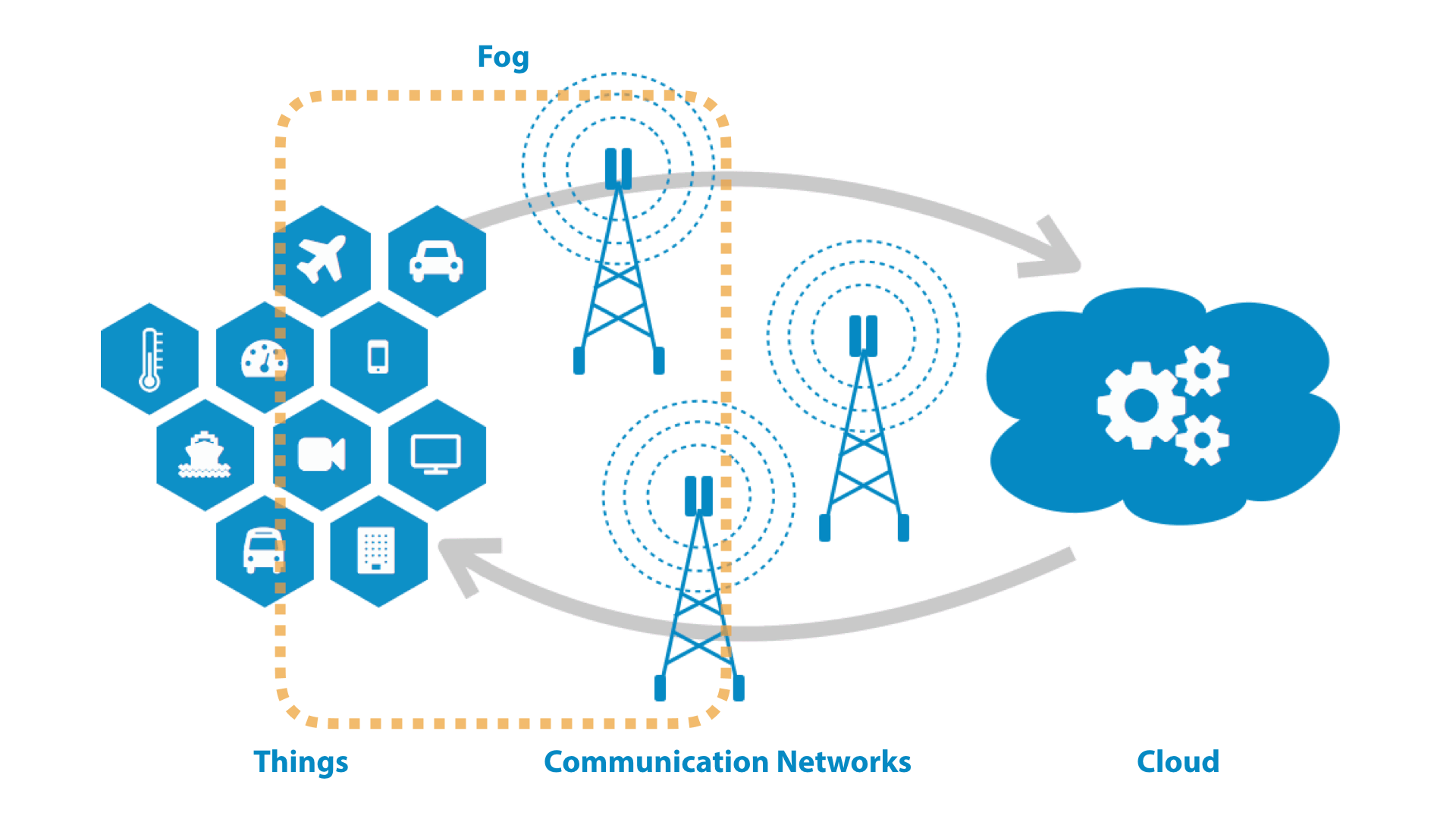
雾计算(Fog Computing)
雾计算作为一种减少本地和远程计算资源之间延迟的方法,由性能较弱、更为分散的各种功能计算机组成,渗入电器、工厂、汽车、街灯及人们生活中的各种物品。
简单点说,它拓展了云计算的概念,相对于云计算它离产生数据的地方更近,数据、数据相关的处理和应用程序都集中于网络边缘的设备中,而不是几乎全部保存在云端。这里因“云”而“雾”的命名源自“雾是更贴近地面的云”这句话。
边缘计算(Edge Computing)
这个词现在听的更多一些。它进一步推进了雾计算中“局域网处理能力”的理念,也就是说资产硬件更近一些。边缘计算将边缘网关或设备的智能、处理能力和通信操作直接驱动到设备本身,如PACs(可编程自动化控制器)。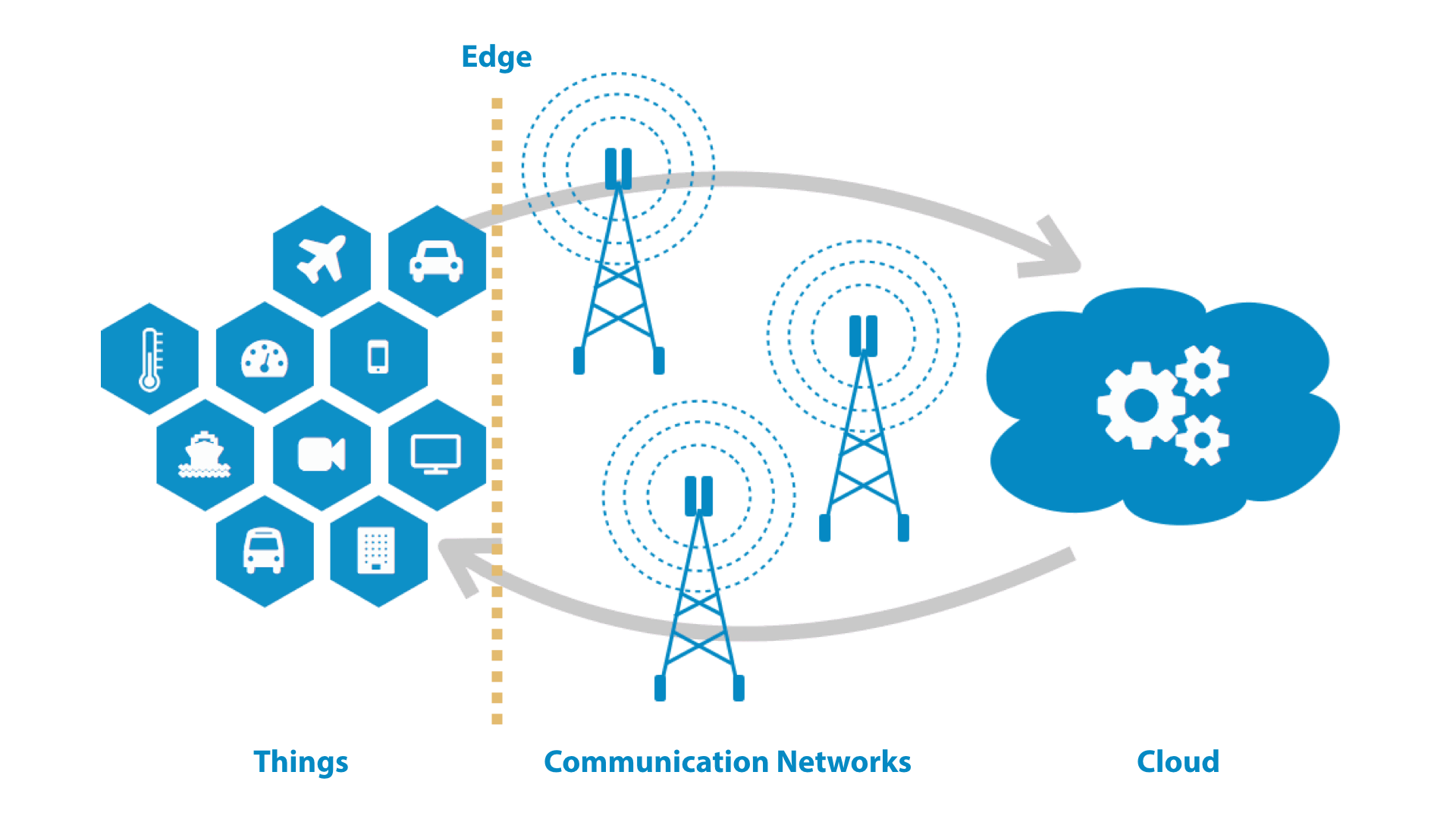
比较
相同的优势
- 实时数据分析 — 由于数据是在数据生成源处处理的,因此可以实时或接近实时地进行分析。
- 降低成本:这些技术降低了成本,因为与云或数据中心相比,企业对本地设备的数据带宽管理解决方案的需求更少。
- 低带宽消耗:不需要高带宽来处理数据,因为处理将发生在边缘本身。
- 低延迟:这是边缘计算和雾计算的主要优点。与遥远的云或数据中心相比,它们减少了来回发送数据所需的时间,从而降低了延迟。
- 容错性:暂时失去与云端的连接也没有问题,可以继续工作。
差异
边缘计算通常直接发生在与传感器相连的设备或物理上“接近”传感器的网关设备上。雾计算将边缘计算活动移动到连接到局域网或局域网硬件本身的处理器上,因此它们可能在物理上距离传感器和执行器更远。
因此,雾计算数据在局域网内的雾节点或物联网网关内进行处理。在边缘计算方面,数据在设备或传感器或直连的网关上进行处理,而不需要传输到任何地方。
总结
| 边缘计算 | 雾计算 | 云计算 | |
|---|---|---|---|
| 实时性 | 高 | 较高 | 低 |
| 延迟性 | 低 | 较低 | 高 |
| 带宽消耗 | 低 | 中 | 高 |
| 容错性 | 高 | 中 | 低 |
| 成本 | 低 | 中 | 高 |
场景
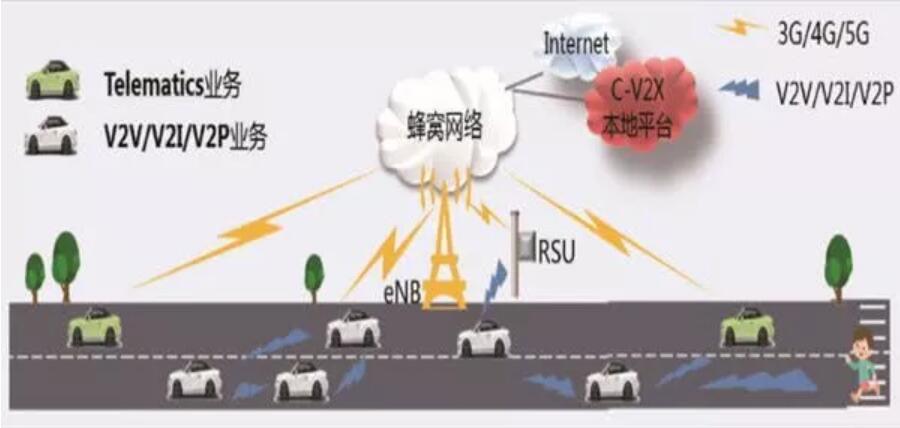
根据我所在的车联网行业构思了一个场景以便理解,这个场景部分已经实现了商用化,部分相信很快也会商用。
在公共运营类车辆有视频监控需求,其中一项是司机行为监控(
Driver State Monitoring DSM),包含疲劳驾驶、分神驾驶、抽烟、接打电话、驾驶人异常等监控和报警等功能。
边缘计算可以安装摄像头、微处理器及报警器等设备解决对司机的实时监控和报警,在有违规的情况下及时提醒司机纠正,保证车内乘客安全。
雾计算可以在公路构建微型服务站,收到车辆中司机行为监控报警后,会向周边车辆发出报警信息,提醒周边车辆司机注意驾驶安全。报警车辆同时及时上传照片及视频信息,留取现场证据。
边缘端和雾端根据需求分别向云端上报信息,在云端储存监控事件,并使用大数据技术挖掘和分析路段安全、车辆安全、司机绩效等有价值的信息。